The Ring and Consistent Hashing: Chord’s Foundation
Part 2a of the Torus DHT Blog Series
The first time I read the Chord paper, I thought I understood it. Hash ring, consistent hashing, O(log N) routing. Simple enough, right?
Then I tried to implement it.
Suddenly, questions I didn’t even know I had started appearing. Why does consistent hashing minimize data movement? How do you actually hash nodes and keys to the same space? And why on earth is everything a circle?
This is the first of two posts breaking down the Chord protocol. Today we’re covering the foundation: the ring topology and consistent hashing. In the next post, we’ll tackle finger tables and routing.
Less theory, more intuition. Less academic rigor, more “oh, that’s how it works.”
A Brief History: The 2001 DHT Revolution
Before diving into Chord specifically, quick context: in 2001, four different research groups independently published four groundbreaking DHT design within months of each other:
- CAN (Content Addressable Network) - UC Berkeley
- Chord - MIT
- Pastry - Rice University / Microsoft Research
- Tapestry - UC Berkeley
All four solved the same problem — efficient, decentralized key lookup but differently. Kademlia (which came shortly after) uses XOR metrics. Pastry uses prefix-based routing. CAN uses multi-dimensional coordinate spaces.
Chord uses a ring and finger tables.
The Chord paper, written by Ion Stoica, Robert Morris, David Karger, Frans Kaashoek, and Hari Balakrishnan at MIT, won an ACM SIGCOMM Test of Time award in 2011. Why? Because it’s arguably the simplest DHT design while still delivering provable O(log N) performance guarantees.
The authors made an explicit choice: clarity and correctness over aggressive optimization. That’s why I chose it for Torus. When you’re learning distributed systems, you want to understand the fundamentals deeply before tackling complex optimizations.
The Circle: Why Everything in Chord is Round
Let’s start with the most basic question: why is Chord organized as a ring?
Here’s the insight: in a distributed system without a central coordinator, you need total order. Every node needs to agree on who comes “before” and “after” in some consistent way, using only local information.
A circle gives you that. It’s a one-dimensional space that wraps around. You can always go clockwise, and you’ll always encounter nodes in the same order, no matter where you start. There’s no “beginning” or “end” just continuous, predictable progression.
The 160-Bit Identifier Space
Chord uses a 160-bit identifier space. That means there are 2^160 possible positions on the ring, approximately 1.46 × 10^48 addresses.
Why 160 bits? The original paper chose it because SHA-1 (Secure Hash Algorithm 1) produces 160-bit hashes, and SHA-1 was the cryptographic standard in the early 2000s.
Quick note: SHA-1 has since been cryptographically broken (collision attacks demonstrated in 2017), but it’s still perfectly fine for Chord’s purposes. We only care about uniform distribution, not cryptographic security against adversarial attacks. Torus actually uses SHA-256 truncated to 160 bits for a more modern approach, but the principle is identical.
Hashing Nodes and Keys to the Ring
Here’s how Chord maps the real world onto this abstract ring:
1. Node identifiers When a node joins, you hash its IP address (or some unique identifier) using SHA-1. The result is a 160-bit number, that’s the node’s position on the ring.
2. Key identifiers When you want to store a key-value pair, you hash the key using the same hash function. The result is a 160-bit number, that’s where the key “lives” on the ring.
Because you’re using a cryptographic hash function, both nodes and keys are uniformly distributed around the ring. No clustering, no hot spots (in theory).
The Successor Relationship
Here’s the fundamental rule in Chord: each key is stored at its successor node.
The successor of an identifier k is the first node you encounter when moving clockwise from k around the ring. That node is “responsible” for all keys between itself and its predecessor.
Let me show you with a tiny example. Imagine a Chord ring with just 4 nodes in a 3-bit identifier space (positions 0 to 7):
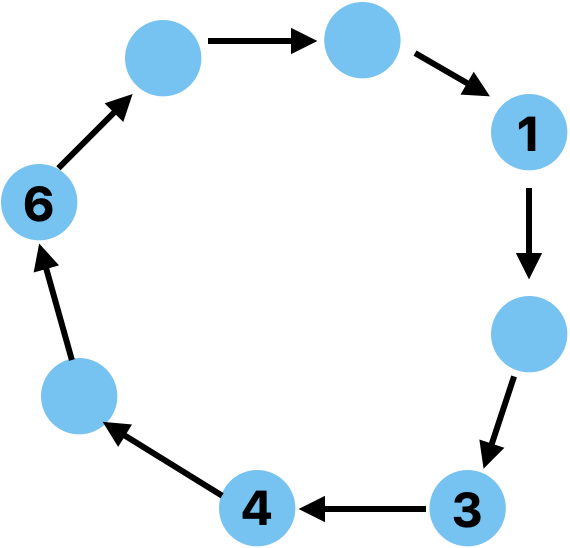
Nodes at positions: 1, 3, 4, 6
- Node 1’s range: keys 7, 0, 1 (predecessor is node 6)
- Node 3’s range: keys 2, 3 (predecessor is node 1)
- Node 4’s range: key 4 (predecessor is node 3)
- Node 6’s range: keys 5, 6 (predecessor is node 4)
If you want to store a key with hash value 5, you move clockwise from position 5 until you hit a node, which is node 6. Node 6 stores that key.
Simple, right? This is the entire storage model.
Consistent Hashing: The Data Movement Miracle
When I first learned about consistent hashing, I glossed over it. “Yeah, it minimizes data movement. Got it.”
But how much does it minimize? And why does it work?
The Traditional Hashing Problem
Imagine you’re building a distributed cache with 10 servers. In traditional hashing, you’d do:
server_index = hash(key) % number_of_servers
With 10 servers, hash("user_session_123") % 10 might give you server 7. Perfect! You know exactly where that key lives.
But what happens when server 3 crashes and you’re down to 9 servers?
server_index = hash(key) % 9
Now hash("user_session_123") % 9 might give you server 4. The key moved. But it’s not just that key, almost every key needs to be recalculated and potentially moved to a different server.
With millions of keys, this is catastrophic. Your entire cache invalidates on a single server failure.
The Consistent Hashing Solution
Consistent hashing solves this by keeping the hash space constant (2^160 in Chord), regardless of how many nodes you have.
Think about it: whether you have 10 nodes or 10,000 nodes, the ring is always 2^160 positions. Nodes don’t change the ring, they just occupy different positions on it.
When a node joins the ring:
- It takes over responsibility for keys in its range (between its predecessor and itself)
- Only those keys need to migrate from the node’s successor
- All other keys stay exactly where they are
When a node leaves:
- Its keys transfer to its successor
- Again, only those keys move
The math is beautiful: On average, only K/N keys need to move when a node joins or leaves, where K is the total number of keys and N is the number of nodes. That’s the minimum possible data movement in any distributed hash table.
Concrete Example: Node Join
Let’s use our 4-node example. Say a new node joins at position 2:
Before node 2 joins:
Nodes: 1, 3, 4, 6
Node 3 is responsible for keys: 2, 3
After node 2 joins:
Nodes: 1, 2, 3, 4, 6
Node 2 is responsible for: key 2
Node 3 is responsible for: key 3
What moved? Only key 2 — from node 3 to node 2.
Keys 0, 1, 4, 5, 6, 7? Still at their original nodes. Didn’t budge.
In a real system with 1 million keys uniformly distributed across 1,000 nodes, adding a new node moves approximately 1,000 keys (1/1000th of the data). Perfectly balanced.
This is huge for scalability. You can add nodes to a running system during peak traffic without triggering a massive data reshuffling.
The Node Join Process
Let’s walk through what actually happens when a new node joins a Chord ring.
When node n wants to join, it needs to:
- Find its successor
- Migrate keys from that successor
- Notify its new neighbors
Step 1: Find Your Successor
Node 2 wants to join our example ring (currently: 1, 3, 4, 6).
It contacts any existing node, let’s say node 1 and asks: “Who is the successor of identifier 2?”
Node 1 performs a lookup (we’ll cover how in the next post) and responds: “Node 3.”
Step 2: Migrate Keys
Now node 2 knows it sits between node 1 and node 3. It asks node 3: “Give me all keys in range (1, 2).”
Node 3 looks through its local storage and transfers key 2 to node 2.
In a real system with many keys, this could be thousands of key-value pairs. But it’s still only the keys that actually belong to node 2, not all the keys in the system.
Step 3: Update Pointers
Node 2 tells node 1: “I’m your new successor.” Node 2 tells node 3: “I’m your new predecessor.”
Both nodes update their internal pointers. The ring structure is now correct.
What About Concurrent Joins?
Here’s where it gets tricky. What if node 2 and node 5 are both joining simultaneously?
The answer: it works, but requires careful synchronization. This is one of those “devil in the details” moments where the theory is simple but the implementation has edge cases.
For example, what if node 2 is asking node 3 for keys while node 5 is also joining and asking node 6 for keys, and those operations somehow interfere? You need proper locking, atomic operations, or transactional semantics.
I encountered this exact bug in Torus. Two nodes joining at the same time would occasionally corrupt the successor pointers because I wasn’t properly synchronizing the updates. The fix required read-write mutexes and careful ordering of operations.
The Stabilization Protocol
Here’s a problem: during the join process, other nodes have stale information. Node 1’s routing table might still point to node 3, even though node 2 is now a better path.
Chord solves this with periodic stabilization. Every node runs a stabilization routine in the background. In Torus, this runs every 3 seconds.
The stabilization protocol is beautifully simple:
1. Verify your successor
- Ask your successor: “Who is your predecessor?”
- If the answer is a node between you and your successor, update your successor to that node
- This catches newly joined nodes that inserted themselves
2. Notify your successor
- Tell your successor: “Hey, I think I’m your predecessor”
- Your successor checks if you’re correct and updates its predecessor pointer
That’s it. Just two steps, running periodically on every node.
Over time (usually quickly within a few stabilization cycles), all nodes converge to the correct state. The ring “heals” itself through local interactions, with no global coordination required.
Why Periodic Instead of Event-Driven?
You might wonder: why not notify all affected nodes immediately when you join?
The answer: because in a distributed system, you don’t know who all the “affected nodes” are without global knowledge. And finding them all would require complex coordination.
Periodic stabilization is simpler and more robust. It handles not just joins, but also failures, network partitions healing, and other dynamic events. One mechanism handles everything.
Node Departure: Graceful vs. Abrupt
When a node wants to leave gracefully, it:
- Transfers all its keys to its successor
- Notifies its predecessor and successor to update their pointers
- Shuts down
The next stabilization cycle cleans up any stale references.
But what if a node crashes? No graceful transfer, no notification, just gone.
This is where successor lists come in (which we’ll cover more in the next post). If each node maintains a list of multiple successors (Torus uses r=8), and replicates keys to those successors, then a crash doesn’t lose data.
The successor’s replica becomes the primary, stabilization detects the failure and updates pointers, and the system continues operating.
The Elegance of Consistent Hashing
What I love about consistent hashing is how it turns a global problem into a local one.
In traditional hashing, adding or removing a server requires global reconfiguration, every client needs to know about the topology change.
In consistent hashing, a node join or leave is a local event. Only the immediate neighbors are involved in key migration. Everyone else? Their routing eventually gets updated through lazy stabilization, but the system keeps working even with stale information.
This is the foundation that makes massive DHTs like BitTorrent’s (with tens of millions of nodes) possible. Nodes are constantly joining and leaving, yet the system remains functional because changes are local and stabilization is gradual.
What We’ve Covered
Let’s recap:
- The ring topology provides total order without central coordination
- 160-bit identifier space ensures uniform distribution and collision resistance
- Successor relationship determines key ownership
- Consistent hashing minimizes data movement to K/N keys on average
- Join process involves finding successor, migrating keys, updating pointers
- Stabilization protocol maintains correctness through periodic local checks
This is the foundation of Chord. The ring structure and consistent hashing give us a stable, scalable way to distribute keys across nodes.
But we haven’t answered the critical question: how do you find a key efficiently?
If you have to ask every node in the system, we’re back to O(N) complexity, useless at scale. We need something better.
That’s where finger tables come in.
Coming Up Next
In Part 2b, we’ll dive into:
- Why the naive O(N) approach doesn’t scale
- How finger tables create exponential shortcuts
- The routing algorithm that achieves O(log N) lookups
- Why the math actually works
- Fault tolerance through successor lists
We’ll also do a worked example of finding a key in a Chord ring, step by step, so you can see the routing algorithm in action.
If you’ve made it this far, you understand Chord’s storage model. Next, we’ll understand its routing model, and that’s where the real magic happens.
Further Reading:
-
Chord: A Scalable Peer-to-peer Lookup Service for Internet Applications - The original MIT paper
-
Dynamo: Amazon’s Highly Available Key-value Store - Uses consistent hashing in production
Comments